자율 주행 기술에서 빠지지 않고 등장하는 기술에 SLAM 기술이 있다.
자율 주행을 위해서는 로봇 스스로가 위치를 추정(navigation)할 수 있어야 하는데, 이를 위해 지도를 작성(mapping)하는 과정에서 사용되는 기술이다.
SLAM : Simultaneous Localization And Mapping
SLAM이란 이름에서 알 수 있듯 자율 주행에 필수적인 스스로 위치 추정을 할 수 있게 도와주는 기술이다.
초기 상태에서 주행하며 얻은 정보를 바탕으로 자신이 주행하는 공간에 대한 지도를 그린 후 다음 주행에서는 내장된 지도를 이용하여 자신의 위치에 대한 추정을 도와주는 기술이라 할 수 있다.
https://google-cartographer-ros.readthedocs.io/en/latest/
구글에서 오픈소스로 제공하는 SLAM 기술인 Cartographer에 대한 명세 사이트이다.
Catographer 테스트
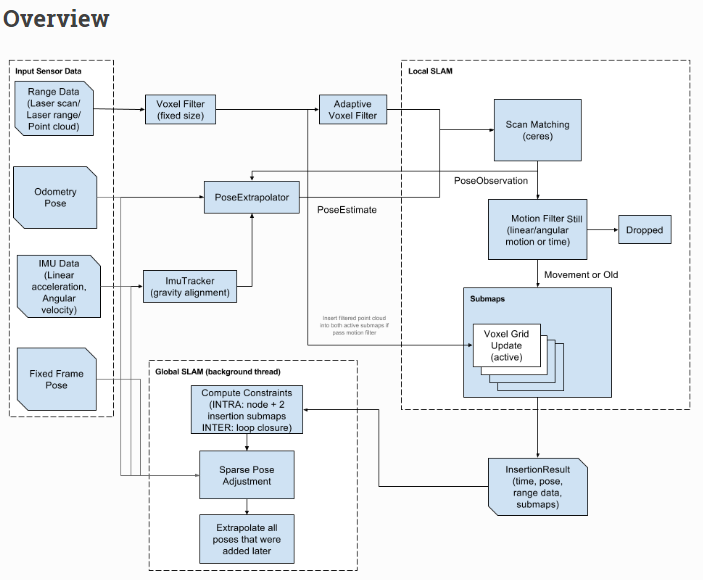
SLAM 기술을 위해서는 LRF(Laser Range Finder), LIDAR, Depth camera 등의 계측 센서가 필요하다.
Depth camera의 경우에는 3차원 정보를 2차 평면상의 정보로 변환 가능해서 사용해야 한다. 즉, 2차 평면 계측 가능 센서를 탑재하고 있어야 한다.
다음으로 Odometry Pose에서 알 수 있듯, 주행 기록계에 대한 정보를 얻을 수 있어야 한다. 즉, 자신이 이동한 거리와 방향을 추측 항법으로 계산하거나 IMU 센서(관성 센서)등을 이용하여 자신의 위치를 계측/추정 가능해야 한다.


SLAM은 주행하면서 얻은 주변 물체들과의 거리 정보를 바탕으로 이를 누적하며 지도를 그린다.
우리는 아직 오도메트리 정보를 얻을 수 있는 어떠한 센서도 가지고 있지 않기 때문에 Catographer를 테스트하면 다음과 같이 이상한 화면으로 지도가 그려진다.
방향을 잡지 못해 고정체의 정확한 위치 파악을 못해서 일어난 현상이다.

카토그래퍼는 어느 정도까지는 오도메트리 없이도 대략적으로 맵이 그려지는 것 같다.
'Embedded > Selly : Sejong Delivery' 카테고리의 다른 글
| [젯슨나노 프로젝트]자율 주행 배달 로봇 Selly(7)_Cartographer SLAM (0) | 2020.05.12 |
|---|---|
| [젯슨나노 프로젝트]자율 주행 배달 로봇 Selly(6)_로봇 프레임 기초작업 (3) | 2020.05.11 |
| [젯슨나노 프로젝트]자율 주행 배달 로봇 Selly(4)_라이다 센서를 이용한 주행 컨트롤 (1) | 2020.05.11 |
| [젯슨나노 프로젝트]자율 주행 배달 로봇 Selly(3)_연습용 로봇 제작과 센서 제어 (2) | 2020.05.11 |
| [젯슨나노 프로젝트]자율 주행 배달 로봇 Selly(2)_ROS 기반의 로봇 소프트웨어 구상 (1) | 2020.05.11 |




댓글